Dynamic Programming
Contact me
Blog -> https://cugtyt.github.io/blog/index
Email -> cugtyt@qq.com
GitHub -> Cugtyt@GitHub
Part 0: FrozenLake
环境是4*4的网格,agent有4种行为:LEFT = 0,DOWN = 1,RIGHT = 2,UP = 3。记为$\mathcal{S}^+ = {0, 1, \ldots, 15}$, $\mathcal{A} = {0, 1, 2, 3}$
env = FrozenLakeEnv()
# print the state space and action space
print(env.observation_space) # Discrete(16)
print(env.action_space) # Discrete(4)
# print the total number of states and actions
print(env.nS) # 16
print(env.nA) # 4
动态规划会假设agent知道马尔科夫决策过程,env.P[1][0]是会返回agent在状态1,向左走的所有可能的奖励和下一个状态:
env.P[1][0]
# output:
# [(0.3333333333333333, 1, 0.0, False),
# (0.3333333333333333, 0, 0.0, False),
# (0.3333333333333333, 5, 0.0, True)]
4列分别为:prob(概率), next_state, reward, done(是否结束),因此可以这样解释结果:
\[\mathbb{P}(S_{t+1}=s',R_{t+1}=r|S_t=1,A_t=0) = \begin{cases} \frac{1}{3} \text{ if } s'=1, r=0\\ \frac{1}{3} \text{ if } s'=0, r=0\\ \frac{1}{3} \text{ if } s'=5, r=0\\ 0 \text{ else} \end{cases}\]Part 1: Iterative Policy Evaluation
输入:
- env
- policy: 2D数组,大小为:
(env.nS, env.nA),policy[s][a]表示agent在状态s采取行为a的概率 - gamma:折扣率,0-1,默认1
- theta: 是否收敛的阈值,默认1e-8
输出:
- V: 1D数组,大小为(env.nS)。
V[s]表示在给定当前策略下状态s的值。
def policy_evaluation(env, policy, gamma=1, theta=1e-8):
V = np.zeros(env.nS)
while True:
delta = 0
# 遍历状态
for s in range(env.nS):
Vs = 0
# 遍历状态s下的行为
for a, action_prob in enumerate(policy[s]):
for prob, next_state, reward, done in env.P[s][a]:
Vs += action_prob * prob * (reward + gamma * V[next_state])
delta = max(delta, np.abs(V[s]-Vs))
V[s] = Vs
# 终止条件
if delta < theta:
break
return V
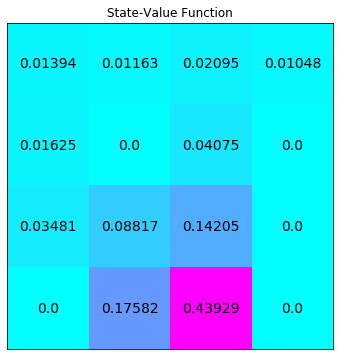
对于均等概率进行测试,即$\pi(a \vert s) = \frac{1}{\vert \mathcal{A}(s) \vert}$:
random_policy = np.ones([env.nS, env.nA]) / env.nA
# evaluate the policy
V = policy_evaluation(env, random_policy)
plot_values(V)
Part 2: Obtain $q_\pi$ from $v_\pi$
输入:
- env
- V: 1D数组,大小为(env.nS)。
V[s]表示在给定当前策略下状态s的值 - s: 一个状态
- gamma:折扣率,0-1,默认1
输出:
- q: 1D数组,大小为(env.nA)。
q[a]表示状态s下,采取行为a的值。
def q_from_v(env, V, s, gamma=1):
q = np.zeros(env.nA)
# 遍历行为
for a in range(env.nA):
for prob, next_state, reward, done in env.P[s][a]:
q[a] += prob * (reward + gamma * V[next_state])
return q
计算所有状态的q:
Q = np.zeros([env.nS, env.nA])
# 对每个状态求所有行为的值
for s in range(env.nS):
Q[s] = q_from_v(env, V, s)
print(Q)
# output
# [[0.0147094 0.01393978 0.01393978 0.01317015]
# [0.00852356 0.01163091 0.0108613 0.01550788]
# [0.02444514 0.02095298 0.02406033 0.01435346]
# [0.01047649 0.01047649 0.00698432 0.01396865]
# [0.02166487 0.01701828 0.01624865 0.01006281]
# [0. 0. 0. 0. ]
# [0.05433538 0.04735105 0.05433538 0.00698432]
# [0. 0. 0. 0. ]
# [0.01701828 0.04099204 0.03480619 0.04640826]
# [0.07020885 0.11755991 0.10595784 0.05895312]
# [0.18940421 0.17582037 0.16001424 0.04297382]
# [0. 0. 0. 0. ]
# [0. 0. 0. 0. ]
# [0.08799677 0.20503718 0.23442716 0.17582037]
# [0.25238823 0.53837051 0.52711478 0.43929118]
# [0. 0. 0. 0. ]]
Part 3: Policy Improvement
下面我们对策略进行改进,依据是q值。
输入:
- env
- V: 1D数组,大小为(env.nS)。
V[s]表示在给定当前策略下状态s的值 - gamma:折扣率,0-1,默认1
输出:
- policy: 2D数组,大小为:
(env.nS, env.nA),policy[s][a]表示agent在状态s采取行为a的概率
def policy_improvement(env, V, gamma=1):
policy = np.zeros([env.nS, env.nA]) / env.nA
# 遍历状态
for s in range(env.nS):
q = q_from_v(env, V, s, gamma)
# 选择 1: 确定性策略,取有最大值的行为
# policy[s][np.argmax(q)] = 1
# 选择 2: 随机策略,对每个最大值的行为设置相等的概率
best_a = np.argwhere(q==np.max(q)).flatten() # 挑选所有最大的
policy[s] = np.sum([np.eye(env.nA)[i] for i in best_a], axis=0)/len(best_a) # 赋值概率
return policy
Part 4: Policy Iteration
输入:
- env
- gamma:折扣率,0-1,默认1
- theta: 是否收敛的阈值,默认1e-8
输出:
- policy: 2D数组,大小为:
(env.nS, env.nA),policy[s][a]表示agent在状态s采取行为a的概率 - V: 1D数组,大小为(env.nS)。
V[s]表示在给定当前策略下状态s的值
def policy_iteration(env, gamma=1, theta=1e-8):
# 先生成随机策略
policy = np.ones([env.nS, env.nA]) / env.nA
while True:
# 根据策略获取状态的值
V = policy_evaluation(env, policy, gamma, theta)
# 根据状态的值更新策略
new_policy = policy_improvement(env, V)
# 选择 1: 如果策略没有再更新,结束
if (new_policy == policy).all():
break;
# 选择 2: 如果更改小于阈值,即收敛了,结束
# if np.max(abs(policy_evaluation(env, policy) - policy_evaluation(env, new_policy))) < theta*1e2:
# break;
policy = copy.copy(new_policy)
return policy, V
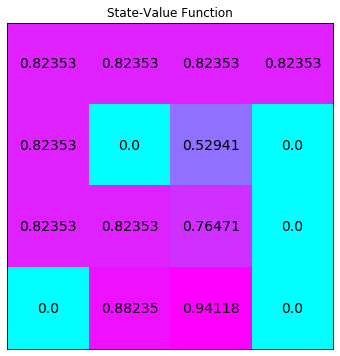
查看效果:
policy_pi, V_pi = policy_iteration(env)
print(policy_pi,"\n")
plot_values(V_pi)
# output
# [[1. 0. 0. 0. ]
# [0. 0. 0. 1. ]
# [0. 0. 0. 1. ]
# [0. 0. 0. 1. ]
# [1. 0. 0. 0. ]
# [0.25 0.25 0.25 0.25]
# [0.5 0. 0.5 0. ]
# [0.25 0.25 0.25 0.25]
# [0. 0. 0. 1. ]
# [0. 1. 0. 0. ]
# [1. 0. 0. 0. ]
# [0.25 0.25 0.25 0.25]
# [0.25 0.25 0.25 0.25]
# [0. 0. 1. 0. ]
# [0. 1. 0. 0. ]
# [0.25 0.25 0.25 0.25]]
Part 5: Truncated Policy Iteration
输入:
- env
- policy: 2D数组,大小为:
(env.nS, env.nA),policy[s][a]表示agent在状态s采取行为a的概率 - V: 1D数组,大小为(env.nS)。
V[s]表示在给定当前策略下状态s的值 - max_it: 扫描次数
- gamma:折扣率,0-1,默认1
输出:
- V: 1D数组,大小为(env.nS)。
V[s]表示在给定当前策略下状态s的值
def truncated_policy_evaluation(env, policy, V, max_it=1, gamma=1):
num_it=0
while num_it < max_it:
# 迭代状态
for s in range(env.nS):
v = 0
# 根据策略计算q值
q = q_from_v(env, V, s, gamma)
# 迭代状态,根据概率更新状态值
for a, action_prob in enumerate(policy[s]):
v += action_prob * q[a]
V[s] = v
num_it += 1
return V
输入:
- env
- max_it: 扫描次数
- gamma:折扣率,0-1,默认1
- theta: 是否收敛的阈值,默认1e-8
输出:
- policy: 2D数组,大小为:
(env.nS, env.nA),policy[s][a]表示agent在状态s采取行为a的概率 - V: 1D数组,大小为(env.nS)。
V[s]表示在给定当前策略下状态s的值
def truncated_policy_iteration(env, max_it=1, gamma=1, theta=1e-8):
# 初始状态值和策略
V = np.zeros(env.nS)
policy = np.zeros([env.nS, env.nA]) / env.nA
while True:
# 改进策略
policy = policy_improvement(env, V)
old_V = copy.copy(V)
# 如果更新小于阈值,结束
V = truncated_policy_evaluation(env, policy, V, max_it, gamma)
if max(abs(V-old_V)) < theta:
break;
return policy, V
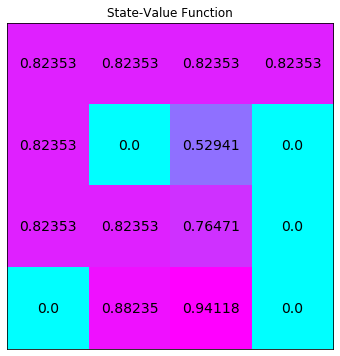
指定迭代次数更新策略:
policy_tpi, V_tpi = truncated_policy_iteration(env, max_it=2)
print(policy_tpi,"\n")
# plot the optimal state-value function
plot_values(V_tpi)
# output
# [[1. 0. 0. 0. ]
# [0. 0. 0. 1. ]
# [0. 0. 0. 1. ]
# [0. 0. 0. 1. ]
# [1. 0. 0. 0. ]
# [0.25 0.25 0.25 0.25]
# [0.5 0. 0.5 0. ]
# [0.25 0.25 0.25 0.25]
# [0. 0. 0. 1. ]
# [0. 1. 0. 0. ]
# [1. 0. 0. 0. ]
# [0.25 0.25 0.25 0.25]
# [0.25 0.25 0.25 0.25]
# [0. 0. 1. 0. ]
# [0. 1. 0. 0. ]
# [0.25 0.25 0.25 0.25]]
Part 6: Value Iteration
输入:
- env
- gamma:折扣率,0-1,默认1
- theta: 是否收敛的阈值,默认1e-8
输出:
- policy: 2D数组,大小为:
(env.nS, env.nA),policy[s][a]表示agent在状态s采取行为a的概率 - V: 1D数组,大小为(env.nS)。
V[s]表示在给定当前策略下状态s的值
def value_iteration(env, gamma=1, theta=1e-8):
V = np.zeros(env.nS)
while True:
delta = 0
# 遍历状态,直到V稳定
for s in range(env.nS):
v = V[s]
V[s] = max(q_from_v(env, V, s, gamma))
delta = max(delta,abs(V[s]-v))
if delta < theta:
break
# 根据V选择策略
policy = policy_improvement(env, V, gamma)
return policy, V
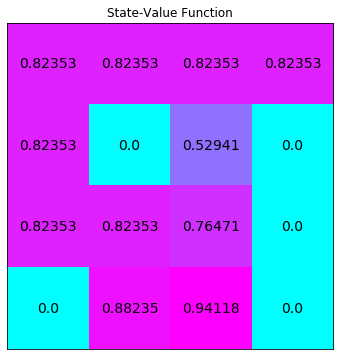
policy_vi, V_vi = value_iteration(env)
print(policy_vi,"\n")
# plot the optimal state-value function
plot_values(V_vi)
# output
# [[1. 0. 0. 0. ]
# [0. 0. 0. 1. ]
# [0. 0. 0. 1. ]
# [0. 0. 0. 1. ]
# [1. 0. 0. 0. ]
# [0.25 0.25 0.25 0.25]
# [0.5 0. 0.5 0. ]
# [0.25 0.25 0.25 0.25]
# [0. 0. 0. 1. ]
# [0. 1. 0. 0. ]
# [1. 0. 0. 0. ]
# [0.25 0.25 0.25 0.25]
# [0.25 0.25 0.25 0.25]
# [0. 0. 1. 0. ]
# [0. 1. 0. 0. ]
# [0.25 0.25 0.25 0.25]]