An introduction to Deep Q-Learning: let’s play Doom
Contact me
Blog -> https://cugtyt.github.io/blog/index
Email -> cugtyt@qq.com
GitHub -> Cugtyt@GitHub
本系列博客主页及相关见此处
来自Thomas Simonini Deep Reinforcement Learning Course Part 3: An introduction to Deep Q-Learning: let’s play Doom
How does Deep Q-Learning work

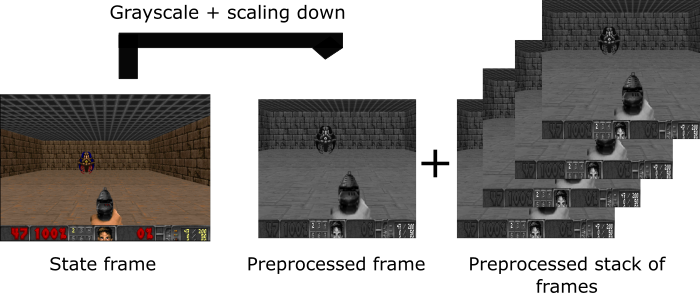
Preprocessing part
-
首先转为灰度图
-
剪切,房顶并无用处
-
减小尺寸,将四个帧堆叠
The problem of temporal limitation
We stack frames together because it helps us to handle the problem of temporal limitation.
If we give him only one frame at a time, it has no idea of motion. And how can it make a correct decision, if it can’t determine where and how fast objects are moving?
Using convolution networksUsing convolution networks
Experience Replay: making more efficient use of observed experience
Experience replay will help us to handle two things:
-
Avoid forgetting previous experiences.
-
Reduce correlations between experiences.
Avoid forgetting previous experiences
We have a big problem: the variability of the weights, because there is high correlation between actions and states.

Reducing correlation between experiences
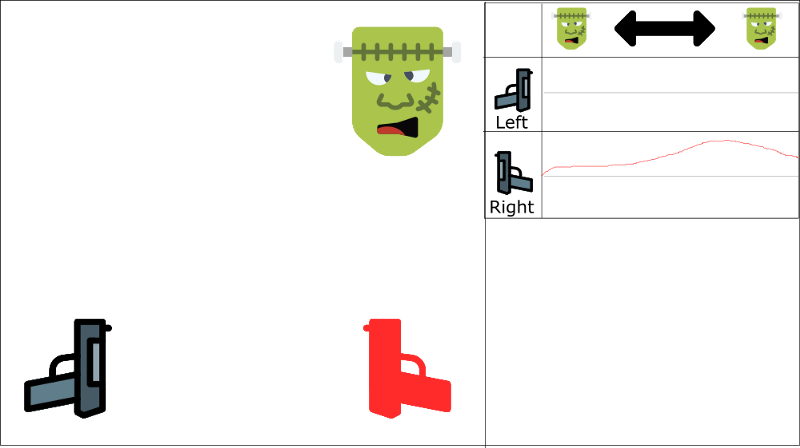
一直学习右枪
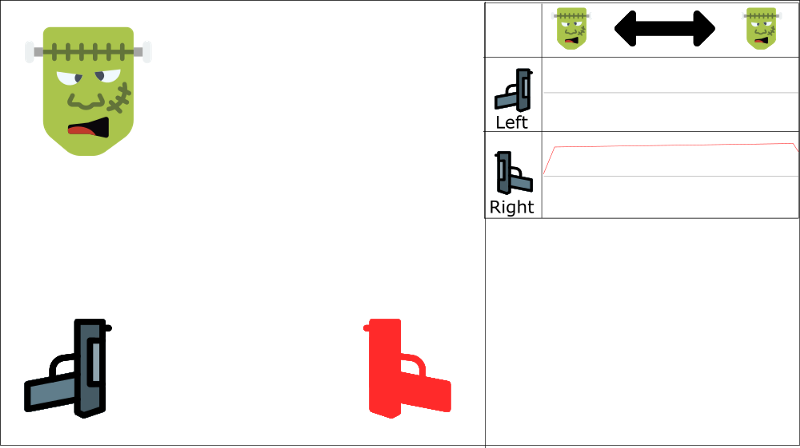
不会开左枪
We have two parallel strategies to handle this problem.
-
First, we must stop learning while interacting with the environment. We should try different things and play a little randomly to explore the state space. We can save these experiences in the replay buffer.
-
Then, we can recall these experiences and learn from them. After that, go back to play with updated value function.
Our Deep Q-Learning algorithm
Initialize Doom Environment E
Initialize replay Memory M with capacity N (= finite capacity)
Initialize the DQN weights w
for episode in max_episode:
s = Environment state
for steps in max_steps:
Choose action a from state s using epsilon greedy.
Take action a, get r (reward) and s' (next state)
Store experience tuple <s, a, r, s'> in M
s = s' (state = new_state)
Get random minibatch of exp tuples from M
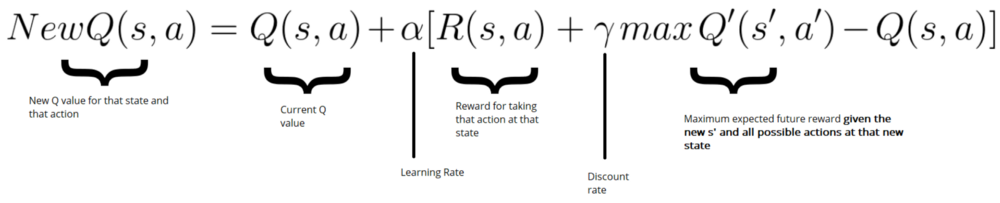
Set Q_target = reward(s,a) + γmaxQ(s')
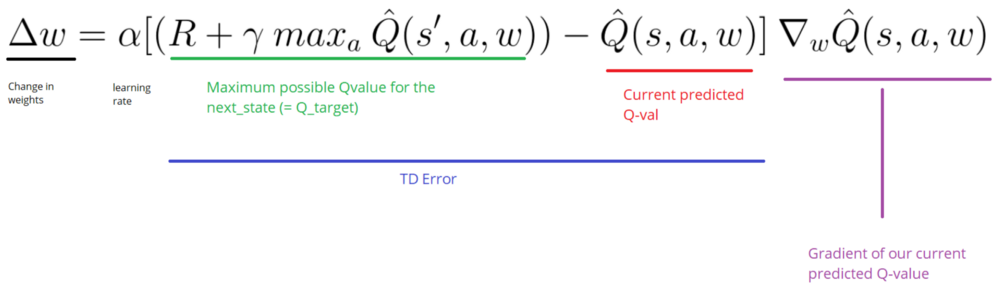
Update w = α(Q_target - Q_value) * ∇w Q_value
There are two processes that are happening in this algorithm:
-
We sample the environment where we perform actions and store the observed experiences tuples in a replay memory.
-
Select the small batch of tuple random and learn from it using a gradient descent update step.