Diving deeper into Reinforcement Learning with Q-Learning
Contact me
Blog -> https://cugtyt.github.io/blog/index
Email -> cugtyt@qq.com
GitHub -> Cugtyt@GitHub
本系列博客主页及相关见此处
来自Thomas Simonini Deep Reinforcement Learning Course Part 2: Diving deeper into Reinforcement Learning with Q-Learning
Q-learning algorithm: learning the Action Value Function
The Action Value Function (or “Q-function”) takes two inputs: “state” and “action.” It returns the expected future reward of that action at that state.

 )
)
The Q-learning algorithm Process
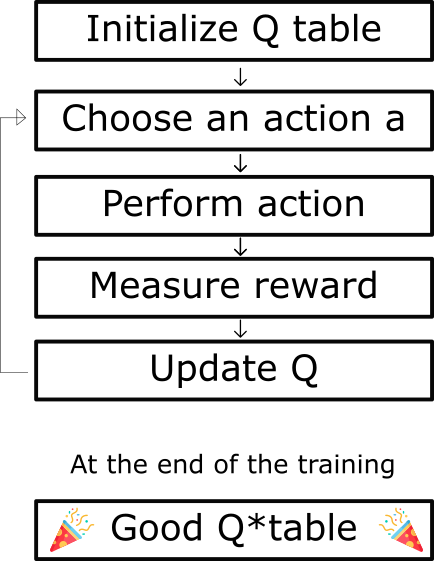

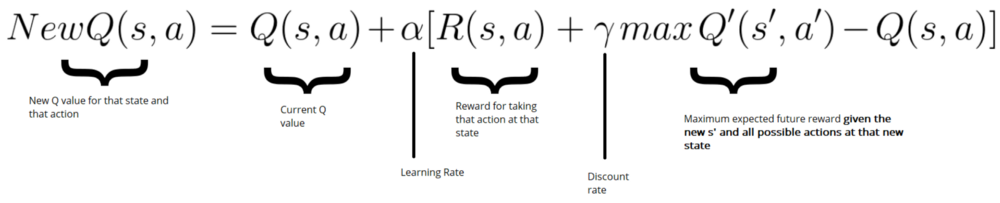
update Q(s,a) we use the Bellman equation:
see Thomas Simonini Deep Reinforcement Learning Course Part 2: Diving deeper into Reinforcement Learning with Q-Learning for more specific process.
Q* Learning with FrozenLake
import numpy as np
import gym
import random
"""Step 1: Create the environment """
env = gym.make("FrozenLake-v0")
"""Step 2: Create the Q-table and initialize it """
action_size = env.action_space.n
state_size = env.observation_space.n
qtable = np.zeros((state_size, action_size))
print(qtable)
"""Step 3: Create the hyperparameters"""
total_episodes = 10000 # Total episodes
learning_rate = 0.8 # Learning rate
max_steps = 99 # Max steps per episode
gamma = 0.95 # Discounting rate
# Exploration parameters
epsilon = 1.0 # Exploration rate
max_epsilon = 1.0 # Exploration probability at start
min_epsilon = 0.01 # Minimum exploration probability
decay_rate = 0.01 # Exponential decay rate for exploration prob
"""Step 4: The Q learning algorithm """
# List of rewards
rewards = []
# 2 For life or until learning is stopped
for episode in range(total_episodes):
# Reset the environment
state = env.reset()
step = 0
done = False
total_rewards = 0
for step in range(max_steps):
# 3. Choose an action a in the current world state (s)
## First we randomize a number
exp_exp_tradeoff = random.uniform(0, 1)
## If this number > greater than epsilon --> exploitation (taking the biggest Q value for this state)
if exp_exp_tradeoff > epsilon:
action = np.argmax(qtable[state,:])
# Else doing a random choice --> exploration
else:
action = env.action_space.sample()
# Take the action (a) and observe the outcome state(s') and reward (r)
new_state, reward, done, info = env.step(action)
# Update Q(s,a):= Q(s,a) + lr [R(s,a) + gamma * max Q(s',a') - Q(s,a)]
# qtable[new_state,:] : all the actions we can take from new state
qtable[state, action] = qtable[state, action] + learning_rate * (reward + gamma * np.max(qtable[new_state, :]) - qtable[state, action])
total_rewards += reward
# Our new state is state
state = new_state
# If done (if we're dead) : finish episode
if done == True:
break
episode += 1
# Reduce epsilon (because we need less and less exploration)
epsilon = min_epsilon + (max_epsilon - min_epsilon)*np.exp(-decay_rate*episode)
rewards.append(total_rewards)
print ("Score over time: " + str(sum(rewards)/total_episodes))
print(qtable)
"""Step 5: Use our Q-table to play FrozenLake !"""
env.reset()
for episode in range(5):
state = env.reset()
step = 0
done = False
print("****************************************************")
print("EPISODE ", episode)
for step in range(max_steps):
env.render()
# Take the action (index) that have the maximum expected future reward given that state
action = np.argmax(qtable[state,:])
new_state, reward, done, info = env.step(action)
if done:
break
state = new_state
env.close()
小结
-
Q-learning是value-based,使用q函数找最优action选择策略
-
使用action-value函数衡量采用哪个action
-
目标是最大化Q函数
-
Q-table用于帮助在每个state寻找最好的action
-
在所有可能的action里选择最好的来最大化期望reward
-
Q来自于特定state下的特定action特性
-
Q(state, action)返回state下采取action的期望reward
-
该函数可以用借助Bellman公式迭代更新Q(s,a)的Q-learning估计
-
Q-table最开始是任意值,探索环境后,Q会越来越好