Multinomial Distribution Learning for Effective Neural Architecture Search
Contact me
- Blog -> https://cugtyt.github.io/blog/index
- Email -> cugtyt@qq.com
- GitHub -> Cugtyt@GitHub
本系列博客主页及相关见此处
ABSTRACT
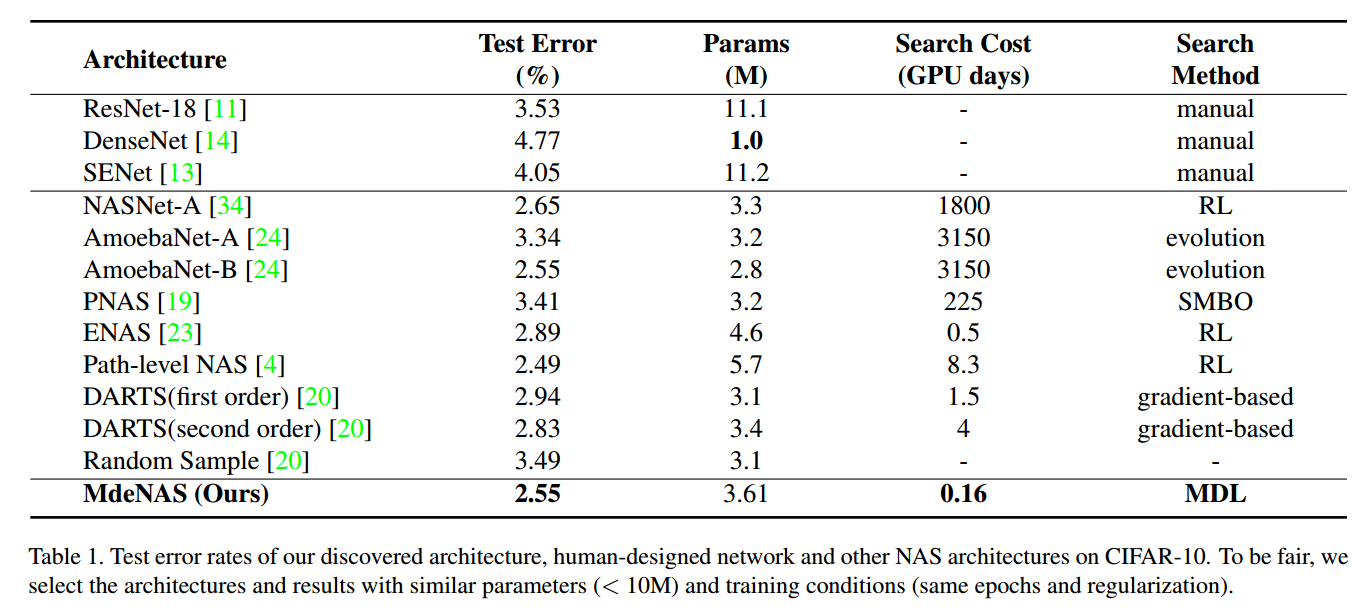
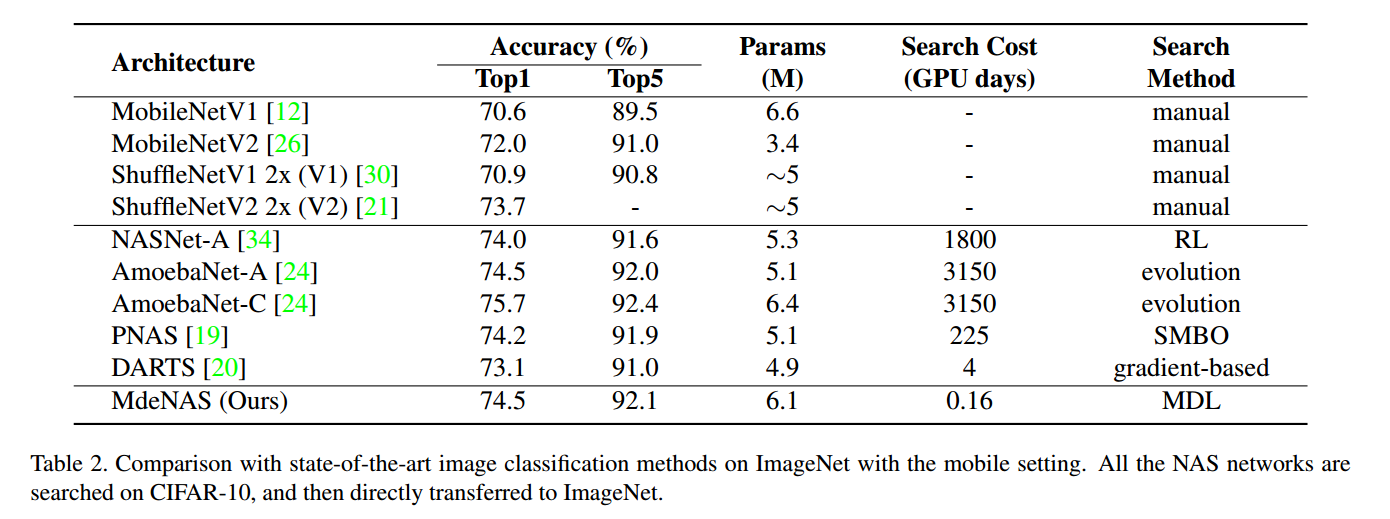
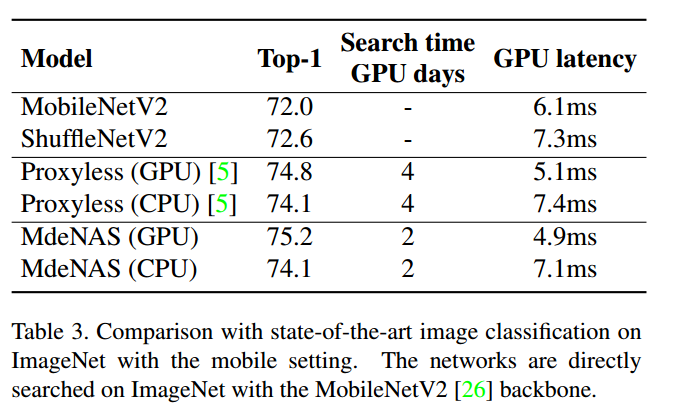
过高的计算量使得NAS难以在实践中应用,我们提出了多项式分布学习用于有效的进行NAS,也就是说,把搜索空间看做是联合多项式分布,最优的网络结构是由这个分布中最高概率的运算得到的。这样NAS可以转换成多项式分布学习问题,优化分布来达到最高的期望性能。提出并证明了一个假设,性能指标在每个训练轮次是稳定的,这更进一步加速了学习过程。在CIFAR10上,我们的方法达到了2.55%的错误率,比当前最好的NAS快6倍(只需要4个GPU小时)。在ImageNet上,达到了75.2%的准确率(MobileNetV1/V2的设置),但是快了1.2倍。
1. Introduction
NAS包括三个部分:搜索空间,搜索策略,性能估计。NAS通过某个搜索策略对特定的卷积结构进行采样,然后估计性能,并看做目标来更新搜索策略。但是NAS方法有过高的计算量和内存占用。虽然有可微的NAS方法把搜索空间松弛到连续的空间上,但是内存占用还是太大,随着候选搜索集合线性增长。
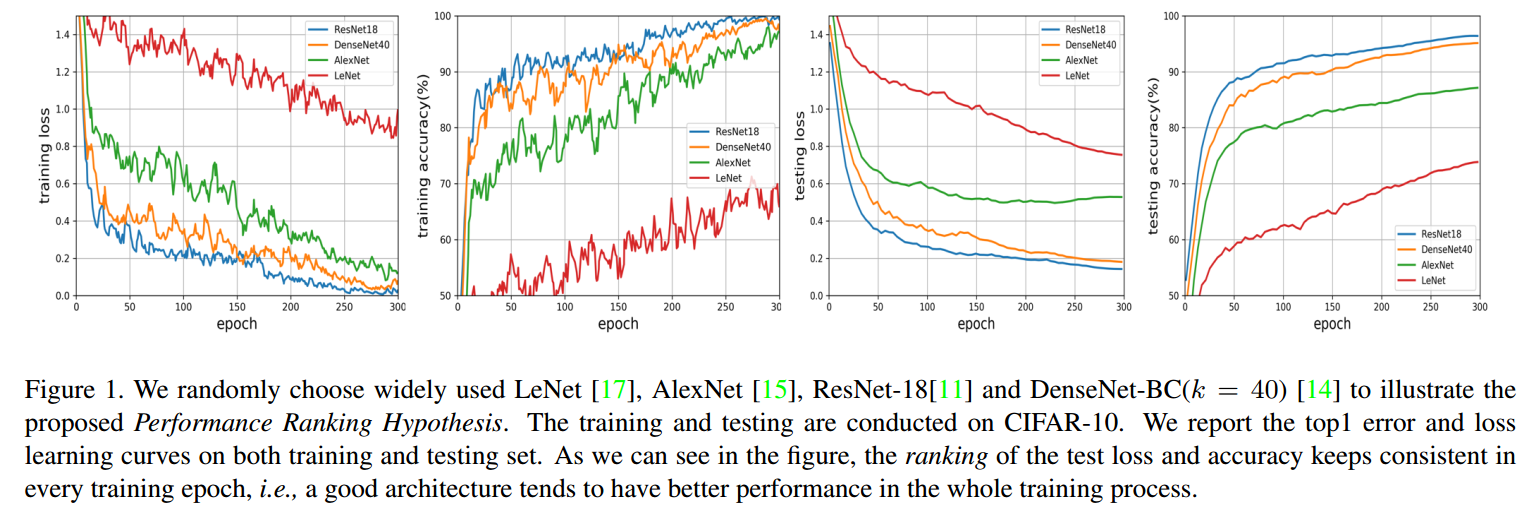
大部分NAS通过标准的训练和验证过程来衡量搜索模型的好坏,但是训练到收敛计算量过大。如果验证步骤可以在几个epoch中完成,那就不需要训练网络直到收敛了。考虑图1的例子,随机挑选了几个网络结构,训练和测试的性能指标一致的(在不同的网络上,不同的训练轮次上,ResNet-18 > DenseNet-BC > AlexNet > LeNet)。基于此,我们提出如下假设:
Performance Ranking Hypothesis 在特定任务上,如果Cell A比Cell B有更高的验证性能,那么训练到收敛,Cell A相对于Cell B在不同的网络结构上都倾向于有更高的性能。
这里,一个cell指的是一个全卷积的有向无环图,最后的网络是通过堆叠不同数量的cell得到的。基于这个假设,不同模型的比较可以在前几个阶段就可以完成,获得最后的结果是不必要的,同样也非常消耗时间。因此我们提出Multinomial distribution for efficient Neural Architecture Search (MdeNAS),把NAS形式化为分布学习过程。候选运算间的概率初始化为相同值,可以看做是多项式分布。在学习中,每个epoch根据当前的性能更新分布的参数,这样将差的运算转换为好的运算。这样可以快速的搜索到高性能网络。
贡献:
- 提出了一个新的NAS方法,占用的内存和计算量都和普通网络训练相近。
- 提出了性能指标假设,结合NAS算法可以加速搜索
- 实验性能好
3. Architecture Search Space
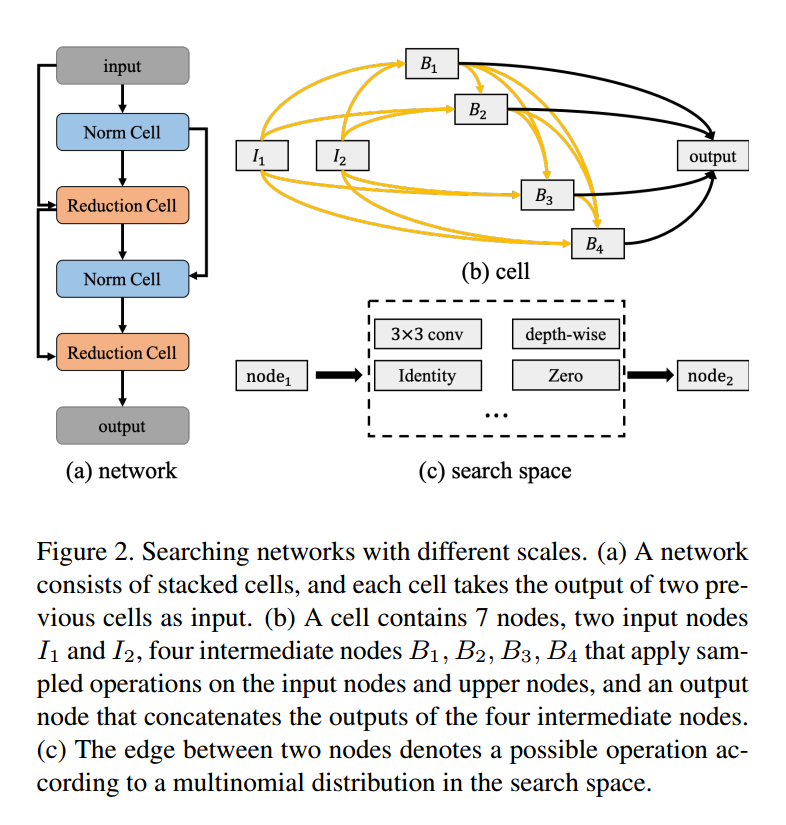
如图2,网络在不同的尺度上定义:network,cell,node。
3.1. Node
node是组成cell最基本的元素。每个节点$x^i$是一个特定的张量,每一个有向边$(i,j)$表示一个运算$o^{(i,j)}$,这个运算是从节点$x^i$到$x^j$采样得到的,如图2c。cell中有三种类型的node,输入节点$x_I$,中间节点$x_B$,输出节点$x_O$。候选运算记作$O$,有八种运算:(1)$3\times3$最大池化,(2)无连接(0),(3)$3\times3$均值池化,(4)跳跃连接,(5)$3\times3$空洞卷积,rate 2,(6)$5\times5$空洞卷积,rate 2,(7)$3\times3$深度可分卷积,(8)$5\times5$深度可分卷积。我们简单的对多个输入只使用了元素相加。
3.2. Cell
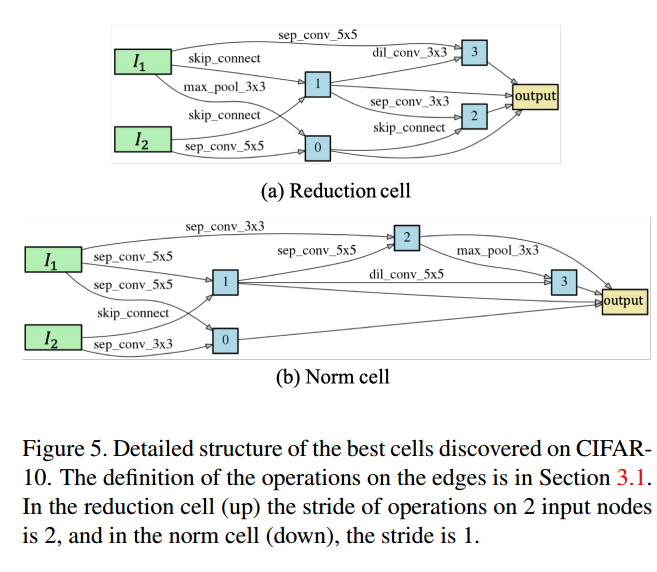
一个cell相当于一个小型的卷积网络,将输入$H\times W \times F$映射到$H’ \times W’ \times F’$。有两种cell:普通cell和下降cell。普通cell的步长为1,输入输出大小相等,下降cell步长为2,长宽变成原来的一半。通道数可以简单的在下降时加倍。
如图2b,cell是一个7节点的有向无环图。整个搜索空间是$2\times 8 ^{\vert \epsilon_N \vert}$,$\epsilon_N$,是N个节点可能的边,我们用$N=4$,那么就是$2\times 8^{2+3+4+5} = 2 \times 8^{14}$。
3.3. Network
在网络的顶层,是全局均值池化和softmax层,基于性能指标假设,我们训练了一个小的堆叠模型(例如6层),然后生成更深的网络(例如20层)用于验证。
4. Methodology
4.1. Sampling
开始时,每两个节点之间的路的概率都设置为$p_i = \frac{1}{M}$,M是可能的路径个数。在采样阶段,把M个概率$\{ p_i \}$二值化$\{ g_i \}$:
那么节点间的运算就是:
\[o^{(i, j)}=o^{(i, j)} * g=\left\{\begin{array}{l}{o_{1} \text { with probability } p_{1}} \\ {\cdots} \\ {o_{M} \text { with probability } p_{M}}\end{array}\right.\]4.2. Multinomial Distribution Learning
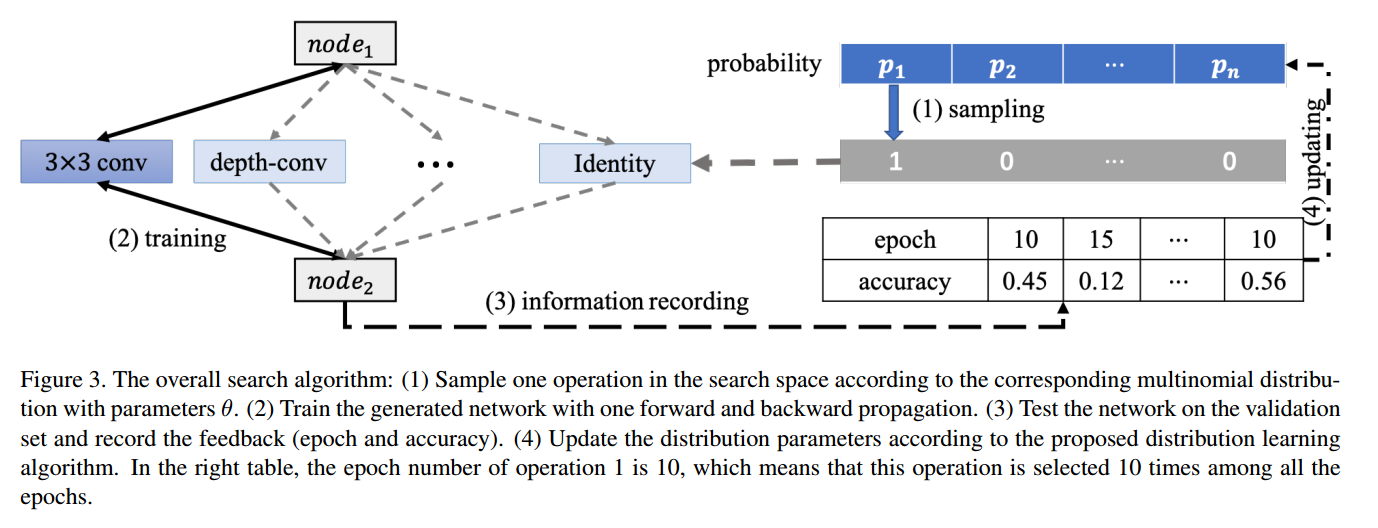
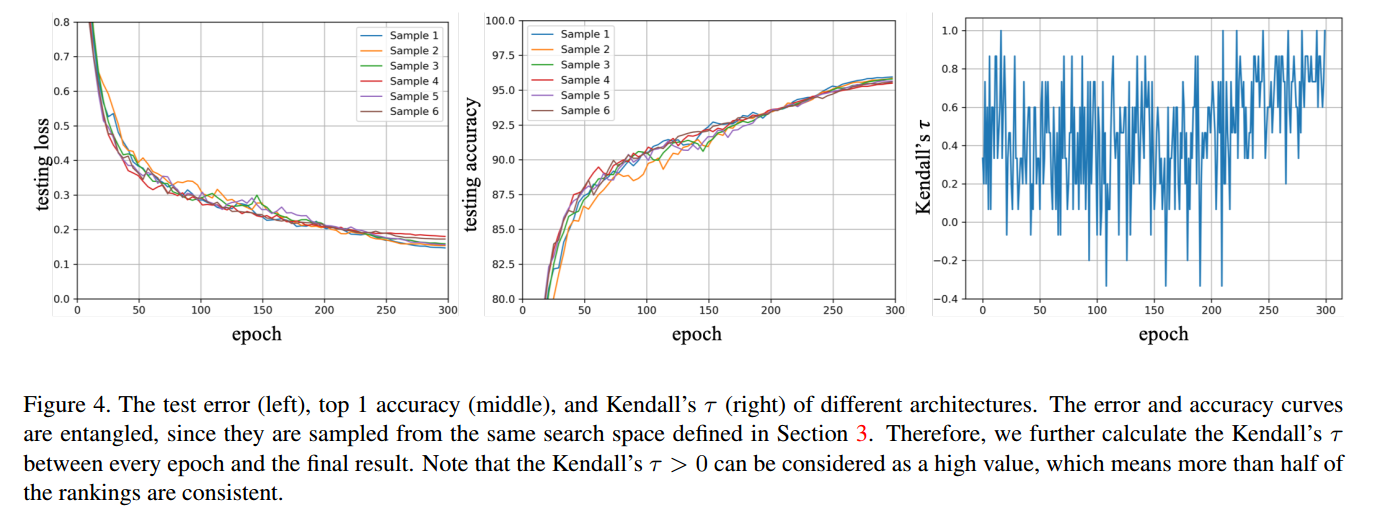
基于我们的假设,我们可以在训练的时候就衡量网络的性能,如图3,搜索空间中每个运算的准确率和训练轮次都记录下来,更少的轮次和更高的准确率表示更好。
定义运算的概率是$p$,训练轮次是$\mathcal{H}^{e}$,准确率是$\mathcal{H}^{a}$,每个都是长度为$M=8$的向量。进一步定义轮次的差值:
\[\Delta \mathcal{H}^{e}=\left[\begin{array}{c}{\left(\overrightarrow{1} \times \mathcal{H}_{1}^{e}-\mathcal{H}^{e}\right)^{T}} \\ {\ldots} \\ {\left(\overrightarrow{1} \times \mathcal{H}_{M}^{e}-\mathcal{H}^{e}\right)^{T}}\end{array}\right]\]准确率的差值:
\[\Delta \mathcal{H}^{a}=\left[\begin{array}{c}{\left(\overrightarrow{1} \times \mathcal{H}_{1}^{a}-\mathcal{H}^{a}\right)^{T}} \\ {\ldots} \\ {\left(\overrightarrow{1} \times \mathcal{H}_{M}^{a}-\mathcal{H}^{a}\right)^{T}}\end{array}\right]\]其中$\overrightarrow{1}$是长度为8的列向量,元素都是1,$\Delta \mathcal{H}^{e}$和$\Delta \mathcal{H}^{a}$都是$8\times8$的矩阵,多项式分布的参数可以如下更新:
\[\begin{aligned} p_{i} \leftarrow p_{i}+\alpha *\left(\sum_{j} \mathbb{1}\left(\Delta \mathcal{H}_{i, j}^{e}<0, \Delta \mathcal{H}_{i, j}^{a}>0\right)-\right.& \\\left.\sum_{j} \mathbb{1}\left(\Delta \mathcal{H}_{i, j}^{e}>0, \Delta \mathcal{H}_{i, j}^{a}<0\right)\right) \end{aligned}\]其中$\alpha$是超参,$\mathbb{1}$是指示函数。
可以看到特定运算$i$的概率可以在更少的epoch$\Delta \mathcal{H}_{i, j}^{e}>0$和更高性能$\Delta \mathcal{H}_{i, j}^{a}>0$下得到提高,反之降低。由于每个epoch都进行更新,收敛非常快,在少数几轮后就稳定了。
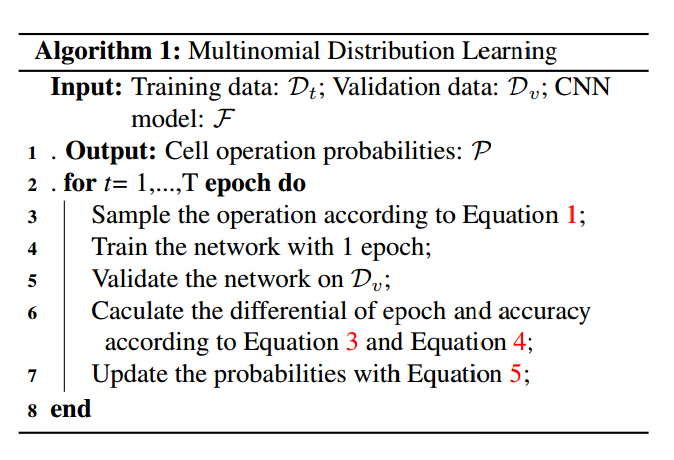
为了得到最终的网络,先选择最大概率的运算,对于多个输入的节点,以top K的概率进行元素相加,最终的网络通过多个cell堆叠。算法如下:
5. Experiment
6. Conclusion
MdeNAS是首个基于分布学习的NAS方法,基于新颖的性能指标假设可以进一步降低搜索时间。我们的方法可以极大降低计算量同时保持模型准确率。