Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
Contact me
- Blog -> https://cugtyt.github.io/blog/index
- Email -> cugtyt@qq.com
- GitHub -> Cugtyt@GitHub
本系列博客主页及相关见此处
Abstract
Fast R-CNN和SPPnet暴露出区域提议计算是瓶颈。我们提出了区域提议网络(RPN),可检测网络共享卷积特征,使得区域提议基本没有计算负担。RPN是全连接网络,可以和判断目标边界一起做,RPN使用端到端的训练生成高质量的区域提议,这被Fast R-CNN用于检测。通过简单的轮换优化,RPN和Fast R-CNN可以共享卷积特征训练。
Introduction
基于区域的CNN计算量很大,通过共享卷积可以极大减少计算量。但是区域提议是现在的计算瓶颈。
我们使用深度网络实现优雅和高效的解决方案,使得区域提议的计算量在检测网络计算中基本消失。我们提出了区域提议网络(RPN),共享卷积层,计算量非常小。
我们观察到基于区域的检测器的卷积特征图可以用来生成区域提议。在这些卷积特征上,我们构建了RPN通过加入两个卷积层:一个把每个卷积图位置编码成一个短的特征向量,另一个把每个特征图位置输出一个目标分数,不同尺度的k个区域提议回归边界。
我们的RPN是一种全卷积网络,可以对生成检测提议任务端到端的训练。把RPN和Fast R-CNN结合起来,我们提出了一个简单的训练方案,在固定提议的情况下,在微调区域提议任务和目标检测任务间交替。这个方法收敛很快,可以通过共享卷积特征成为一个统一的网络。
我们在PASCAL VOC进行了实验,Fast R-CNN+RPN的准确率比选择搜索+Fast R-CNN好。同时速度也很快。
Related Work
【略】
Region Proposal Networks
RPN输入一张任意大小的图片,输出矩形提议的集合,每个包括一个目标分数。我们实验了ZF模型,它有5个可共享的卷积层,和VGG,它有13个可共享的卷积层。
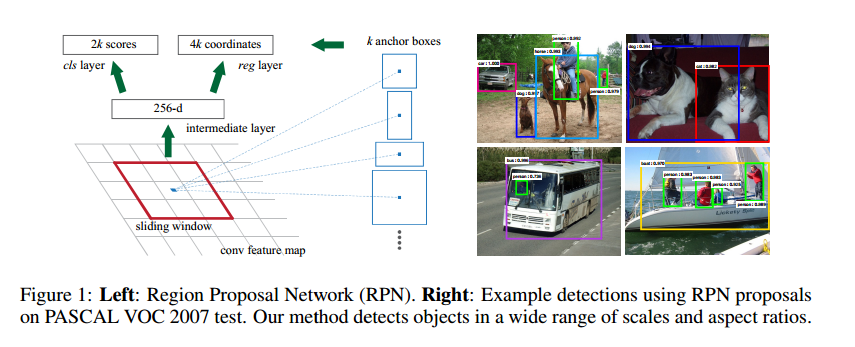
为了生成区域提议,我们在最后一个共享卷积层输出的卷积特征图上滑动一个小网络。这个网络和输入特征图的一个n*n的空间窗全连接。每个滑动窗映射到一个低维向量(ZF是256维,VGG是512维),这个向量输入两个全连接层,一个框回归层,一个分类层。我们使用n=3设置感受野,有效感受野是很大的(ZF是171像素,VGG是228像素)。如图1,注意到由于小网络操作在一个滑动窗上,所以全连接层在整个空间域上共享。这个结构用一个n*n卷积层和两个1*1卷积层。n*n卷积层的输出使用了ReLU。
Translation-Invariant Anchors
每个移动窗,我们同时预测k个区域提议,所以回归层有4k输出,编码了k个坐标框,分类层有2k输出,对每个提议预测有没有目标。k个提议与k个框对应,成为锚。每个锚集中在有问题的滑动窗,与尺度和长宽比有关。我们使用了3种尺度和3种长宽比,这样每个滑动位置有9种锚。对于W*H的特征图,有WHK个锚。
MultiBox方法使用k-means生成800个锚,但不是尺度不变的。
A Loss Function for Learning Region Proposals
训练RPN,我们给每个锚赋值了一个二分类标签。两种锚赋值正类:(1)和真实值之间有最高的IOU,(2)可真实值的IOU高于0.7。一个真实值框可以赋值给多个锚正类。如果IOU低于0.3赋值为负类。非正非负不对训练目标贡献。
我们的损失函数定义为:

i是锚的索引,$p_i$是锚i为一个目标的概率。如果锚是正,真实标签$p_i^$为1,否则为负。$t_i$是预测边界框的坐标,$t_i^$是真实值。分类损失$L_{cls}$是两个类的log损失,目标和非目标。回归损失我们使用 ,其中R是鲁棒损失(平滑L1)。
,其中R是鲁棒损失(平滑L1)。$p_i^*L_{reg}$表示在锚为正类$p_i^*$回归损失激活,否则失效。分类和回归层的输出包括{$p_i$}和{$t_i$},这两个通过$N_{cls}$和$N_{reg}$标准化,用权重$\lambda$平衡。
对于回归我们采用了参数化的坐标:

每个回归器对一个尺度和长宽比负责,k个回归器不共享权重。因此,可以对不同大小边界框预测,即使特征是固定大小的。
Optimization
RPN是全卷积网络,可以端到端的使用反向传播训练。虽然可以对所以的锚优化损失函数,但是由于负类很多,所以会偏向负类。我们随机从图像中采样256个锚,来计算损失函数,正负类比例1:1。
Sharing Convolutional Features for Region Proposal and Object Detection
我们希望在RPN和Fast R-CNN之间共享卷积层,这不是说定义一个网络包括了RPN和Fast R-CNN,然后一同使用反向传播优化。因为Fast R-CNN的训练取决于固定的目标提议,目前还不清楚同时改变提议方法是否会收敛。我们提出了4步训练算法来交替优化:
第一步,训练RPN,使用ImageNet预训练模型初始化,然后微调。第二步,训练一个独立的检测网络,使用第一步的RPN网络生成区域提议来训练。检测网络也使用ImageNet上预训练模型初始化,这样这两个模型不共享卷积层。第三步,我们使用检测网络初始化RPN训练,但是固定共享卷积层,只是微调RPN独有的层,现在这两个网络共享卷积层。最后一步,保持共享卷积层不变,微调检测网络的全连接层。这样,两个网络共享相同的卷积层,组成了一个统一的网络。
Implementation Details
我们使用单一尺度的图像训练和测试区域提议和目标检测网络。我们把图像重设大小。多尺度的特征提取或许会提升准确率,但是还没有一个很好的权衡。我们注意到ZF和VGG,最后一层卷积层所有的步长是16像素,即使这样的大步长提供了好的结果,小步长也许会有更好的效果。
对于锚,我们使用了3个尺度,$128^2,256^2,512^2$,3个长宽比,1:1,1:2,2:1。
如果跨边界的离群点不被忽略的话,会造成大的难以修正的错误,训练也不会收敛。
一些RPN提议和其他高度重叠,为了减少冗余,我们采用了基于类别分数的非最大抑制(NMS)。我们展示了NMS不会损害检测准确率,但是明显的减少了提议数量,在NMS后,我们使用top-N等级的提议区域。
Experiments
对于ImageNet上的预训练网络,我们使用了ZF网络的快速版本,有5层卷积层和3层全连接层。VGG16模型有13层卷积层和3层全连接层。我们主要衡量了mAP,因为这是主要的目标检测衡量标准。
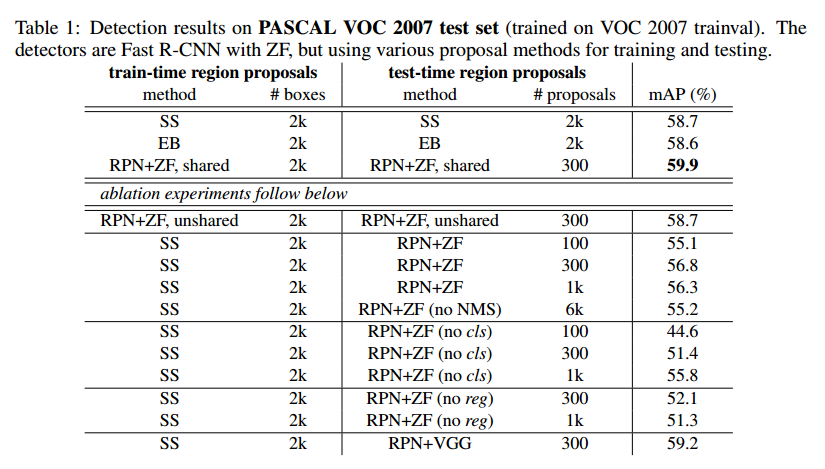
表1显示了使用不同区域提议的结果,这里使用的是ZF网络。
Ablation Experiments
我们进行了剥离实验。首先是RPN和Fast R-CNN共享卷积层的作用,我们停止了四步中的第二步,一点影响,这是因为第三步检测器特征用于微调RPN,提议质量得到提升。
接着我们看RPN对于Fast R-CNN检测的影响。这次RPN没有和检测器共享特征。
把SS换成RPN造成mAP的损失是因为测试和训练的不一致。
后面我们分别实验了分类和回归的RPN。分类层移除时,我们随机采样N个提议,N=1k时mAP基本不变,N=100时掉很严重,这说明分类分数是准确率高的原因。
另外,当回归层移除时,mAP掉了。这说明高质量的提议主要时回归位置的作用。
我们把ZF换成VGG,效果更好。
Detection Accuracy and Running Time of VGG-16
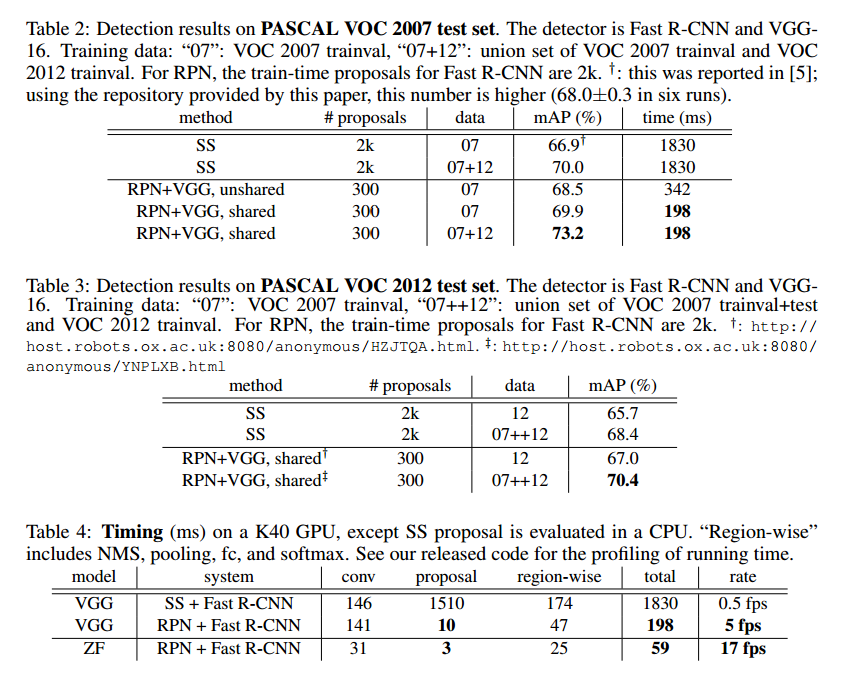
表2时提议和检测的结果。表3是在VOC2012上的测试,表4是运行时间的总结。
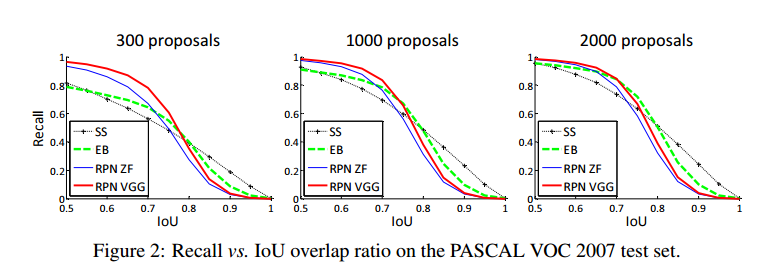
Analysis of Recall-to-IoU
我们计算在不同IOU下的召回率。图2是使用300,1k,2k提议的结果。
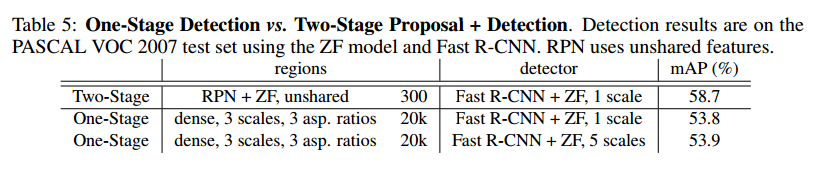
One-Stage Detection vs. Two-Stage Proposal + Detection
表5是比较结果。
Conclusion
我们提出了RPN用于高效和准确的区域提议生成,通过和下游检测网络共享卷积特征,区域提议基本没有负担,提升了区域提议的质量和整个目标检测的准确率。