You Only Look Once: Unified, Real-Time Object Detection
Contact me
- Blog -> https://cugtyt.github.io/blog/index
- Email -> cugtyt@qq.com
- GitHub -> Cugtyt@GitHub
本系列博客主页及相关见此处
Abstract
我们提出的YOLO是一个的新方法。先前的工作是用分类来做检测,我们使用回归问题来解决边界框和类别概率。使用一个神经网络直接从全图来预测边界框和类别概率,因此可以端到端的优化。
我们的模型很快,可以实时每秒45帧处理,一个更小的版本Fast YOLO可以每秒155帧处理,仍然可以达到其他实时检测的两倍mAP值。YOLO比当前最好的检测系统定位错误更高,但是对背景检测甲阳率更低。
Introduction
当前的检测系统用分类器来做检测。这些系统用一个目标分类器,在图像不同的位置和尺度检测目标。像DPM使用滑动窗的方法对整个图像的空间位置进行检测。
最近R-CNN使用区域提议先生成潜在的边界框,然后对这些框分类。在分类后,后处理来微调边界框,减小重叠检测,基于情景中的其他目标重新对框评判。这些复杂的步骤很慢很难优化,因为每个部分都必须单独训练。
我们把目标检测作为一个单一的回归问题,直接从像素到边界框坐标和类别概率。
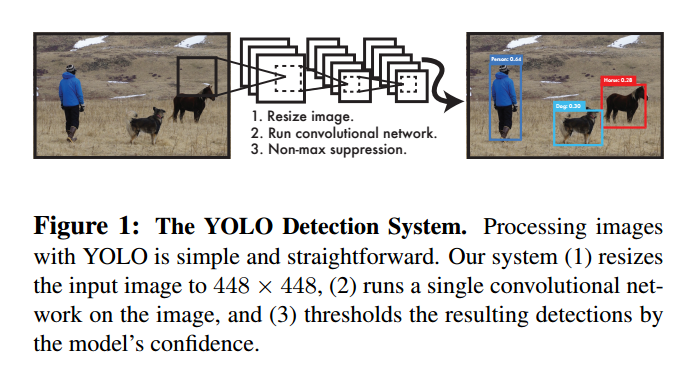
如图1,一个单独的卷积网络同时预测边界框和类别概率。YOLO有以下优点:
首先,YOLO非常快,因为我们把目标检测作为一个回归问题,因此我们不需要复杂的步骤。它比其他实时系统高两倍的平均准确率。
其次,YOLO从图像全局来预测。不同于滑动窗和区域提议,YOLO看图像一次,把类别的内容信息进行了编码。Fast R-CNN在背景检测上犯错误因为它不能看到更大的场景。YOLO比Fast R-CNN背景错误率小一半。
第三,YOLO学习了目标的通用表示。在不同的输入也应该有不错的性能。
YOLO在准确率上还落后于最好的检测系统。它能快速的判别目标,但是对精确的定位还很吃力,尤其是小物体。
Unified Detection
YOLO把目标检测的不同部分集成到一个神经网络里,可以实现端到端的训练,在保持高准确率的前提下有实时的速度。
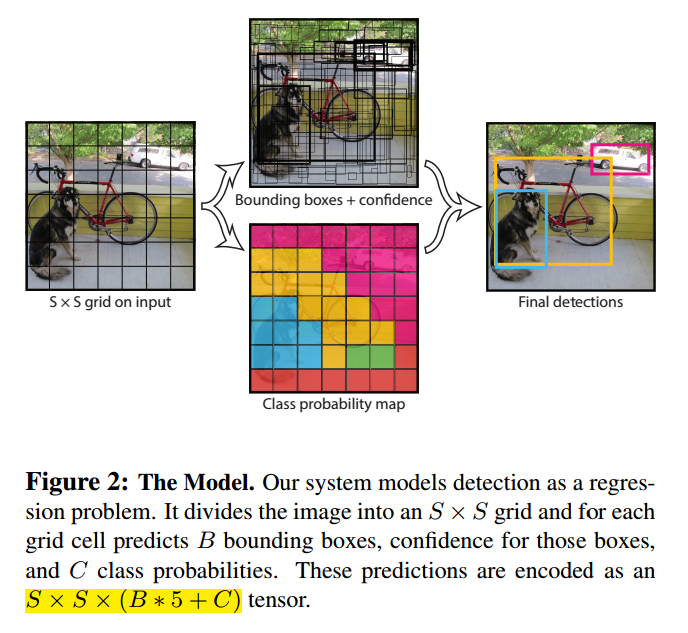
我们的系统把图像分为S*S格子,如果目标的中心落入一个格子,这个格子负责检测目标。
每个格子预测B个边界框和框的置信分数。置信分数定义为 ,如果没有目标,分数为0。另外我们希望置信分数正比于预测框和真实值的交集。
,如果没有目标,分数为0。另外我们希望置信分数正比于预测框和真实值的交集。
每个边框包括5个部分:x,y,w,h和置信度。(x,y)是框中心,w,h是宽和高,置信分数表示了预测框和真实值的交集。
每个格子预测C个条件概率, ,我们只预测每个格子的类别概率,不管格子的数量。
,我们只预测每个格子的类别概率,不管格子的数量。
测试时,我们把类别条件概率和单独的置信预测相乘:

这是每个格子的类别的置信分数,这个分数编码了类别的概率和边框和目标的吻合情况。
Network Design
初始的卷积层提取图像特征,全连接层预测输出概率和坐标。
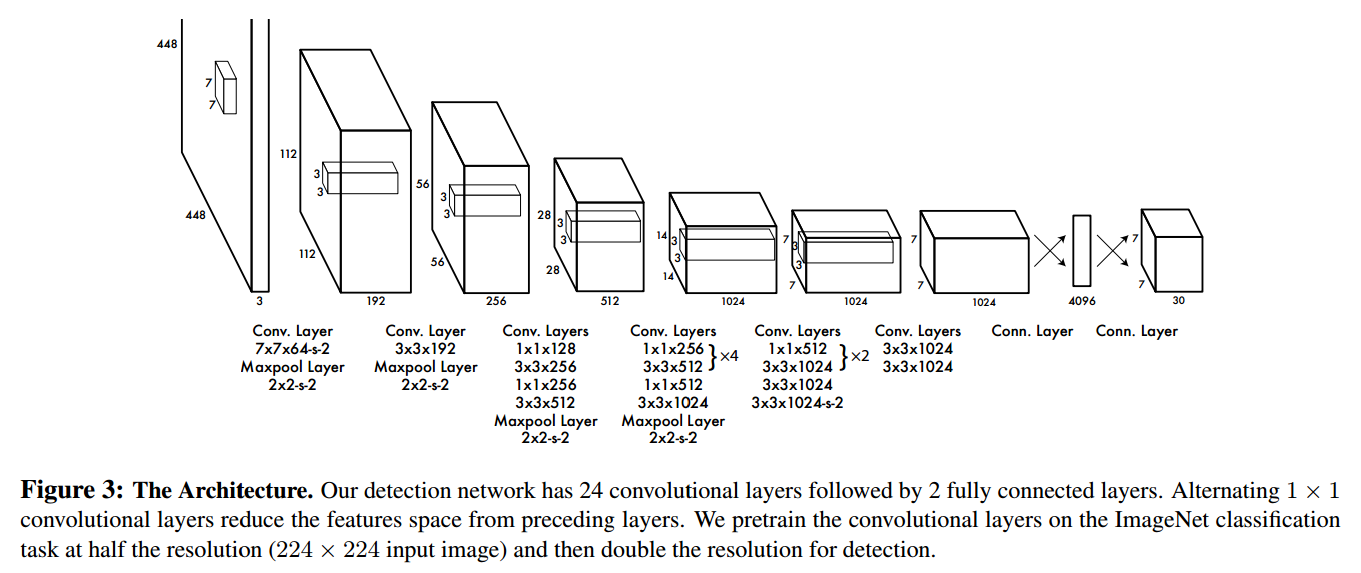
我们受GoogLeNet启发,有24个卷积层和2个全连接层。我们使用了1*1后3*3来做降维。整个网络如图3。
我们也训练了一个YOLO的快速版做更快的目标检测。使用了更少的9层卷积层,其他的训练参数一致。
Training
我们在ImageNet上进行了训练。预训练我们使用了前20层卷积层,然后是均值池化和全连接。我们训练了一周,达到了top-5准确率88%。
然后我们把模型转为检测。研究显示预训练网络加入卷积和连接层可以提高性能。因此我们加入了4层卷积层和2层全连接层,随机初始化了权重。我们增加了输入分辨率从224*224到448*448,以满足检测对可视信息高的要求。
最后一层预测类别概率和边界位置,我们归一化了边界的宽和高,让他们落入0-1。我们也把x和y参数化到0-1。
我们使用了如下激活:
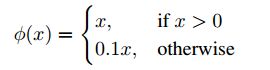
我们使用了平方和错误,原因是它非常容易优化,但是和我们最大化均值准确率的目标不是很吻合。它把定位错误和分类错误同等看代,这不是理想的情况。很多格子事没有目标的,这让置信分数趋于0,提高了包含目标格子的梯度,这导致了模型不稳定,导致训练提前发散。
为了解决,我们增加了边框位置的损失,降低了不含目标置信分数的损失。我们使用了两个参数,$\lambda_{coord}=5$和$\lambda_{noobj}=.5$来完成。
平方错误也把大边框和小边框的错误同等看代,我们用边界框的宽和高的平方根而不是直接使用宽和高。
YOLO对每个格子的多个边界框判断。训练时我们希望一个判别器负责一个目标,我们基于和真实值最高交集来分配负责的判别器。这导致判别器的特殊化,每个判别器在特定大小,方向角,目标类别上越来越好,提升了总体的召回率。
训练使用的损失函数是:
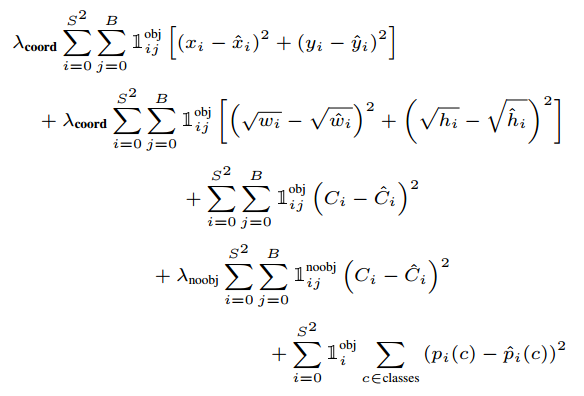
注意到损失函数只在格子目标存在时惩罚,也就是前面说的条件类别概率。只惩罚负责判别器的坐标错误。
学习率:第一个周期缓慢的从1e-3到1e-2,如果刚开始学习率高,模型会因为不稳定发散。然后1e-2训练75周期,1e-3训练30个周期,1e-430个周期。
为了防止过拟合,我们使用dropout和数据增强。
Inference
网格的设计迫使边界框的空间多样性,通常目标落入那个格子非常清楚。但是一些大的目标或多个格子边界的目标会被多个格子定位,非最大化抑制可以解决这个问题。虽然对于R-CNN和DPM不是个关键的问题,但是非最大化抑制可以提高mAP2-3%。
Limitations of YOLO
YOLO在空间上有很大的限制,因为每个格子只预测两个边框,只能有一类。这个限制模型可以预测的类别数。
由于模型从数据集学习边界框,泛化到不同的目标会有困难。因为模型使用了下采样,因此使用了粗糙的特征。
最后,我们的损失函数同等对待小边界框和大边界框。
Comparison to Other Detection Systems
Deformable parts models使用滑动窗实现目标检测。我们更快更准确。
R-CNN使用区域提议,选择搜索产生潜在的边界框,卷积网络提取特征,SVM打分,线性模型调整边界框,非最大抑制减小重叠检测。每个部分都是独立的,非常慢。
Other Fast Detectors虽然速度和准确率比R-CNN提升了,但是离实时还差很远。
【略】
Experiments
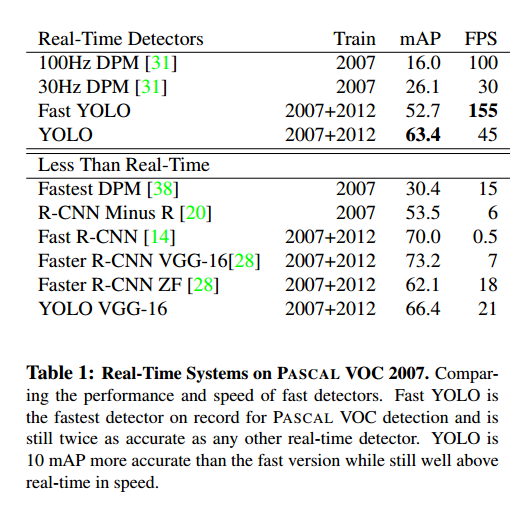
我们在PASCAL VOC 2007上和其他实时系统进行了对比,我们比较了YOLO和Fast R-CNN。我们展示了YOLO可以为Fast R-CNN重打分,减低背景的甲阳率,达到很好的性能。
Comparison to Other Real-Time Systems
Fast YOLO是在PASCAL上最快的目标检测,比其他多两倍的准确率,有52.7%的mAP。YOLO可以达到63.4%的准确率。
我们用VGG-16训练了YOLO,更加准确,但是慢。
VOC 2007 Error Analysis
比较了YOLO和目前最好的检测器Fast R-CNN。对于每个类别,我们看最高的N个判别,或者正确或者有以下错误:
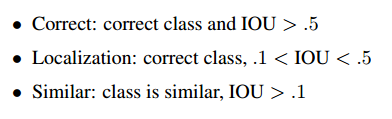

图4显示了20个类的错误类型。
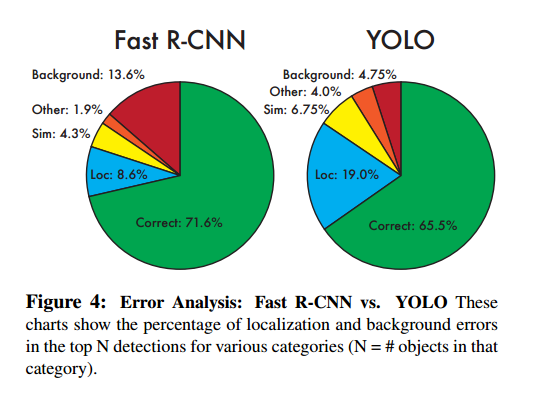
YOLO在定位目标还不是很好。Fast R-CNN定位错误更少,但是背景错误更多。Fast R-CNN比YOLO有3倍的背景检测。
Combining Fast R-CNN and YOLO
对于每个R-CNN检测边界框,我们检查YOLO是否预测相似,如果是的话,我们基于YOLO的预测概率实行联合推进。
Fast R-CNN最好达到71.8%的mAP,和YOLO结合后,提升3.2%到75.0%。我们还做了其他的尝试,如表2。
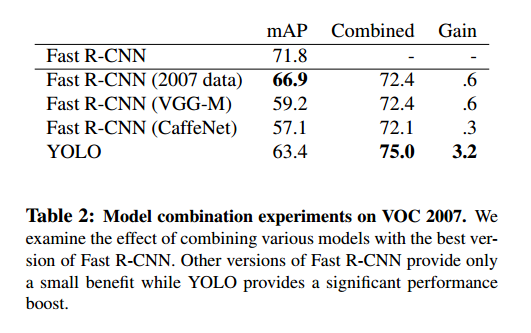
二者的联合不是简单的模型集成,而是精确的,因为YOLO在犯不同的错,可以通过Fast R-CNN提升性能。
但是这个结合不能从YOLO的速度收益,因为我们分别运行了模型。
VOC 2012 Results
在VOC 2012测试集上,YOLO达到57.9%mAP。低于最好的结果,但是使用VGG-16接近R-CNN。见表3。
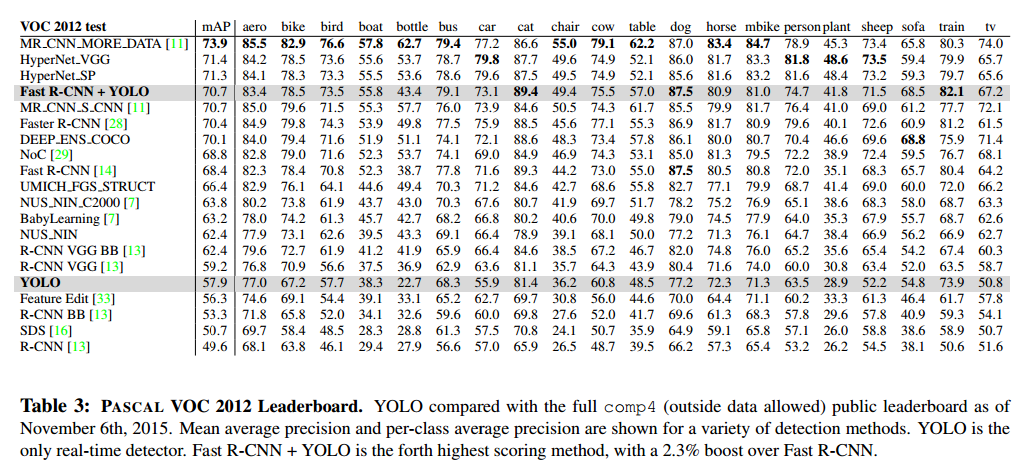
Fast R-CNN和YOLO的结合是最好的检测方法。
Generalizability: Person Detection in Artwork
图5显示了YOLO和其他检测方法的比较。
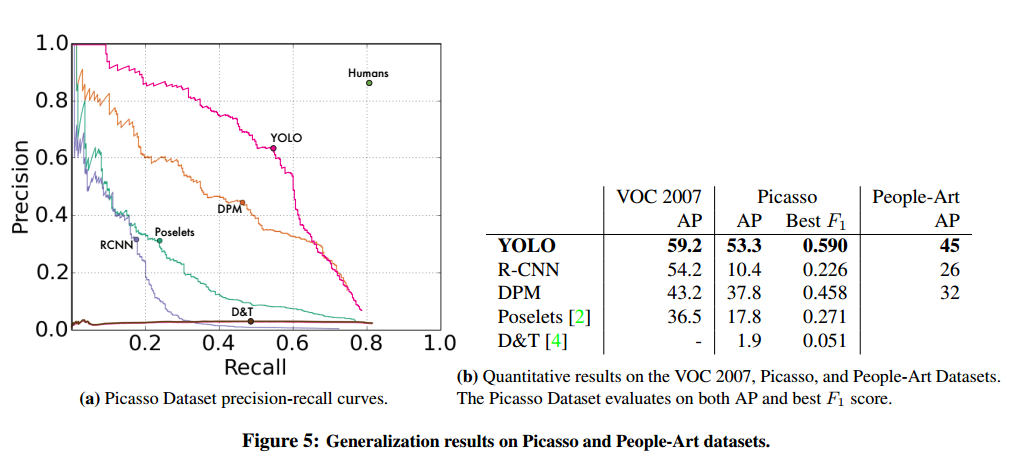
R-CNN在VOC 2007有最高的AP。但是R-CNN在artwork上掉的很多。
YOLO在VOC 2007有很好的性能,在应用到artwork上掉的最少。
Real-Time Detection In The Wild
YOLO快速准确,应用于计算机视觉时很理想的。【略】
Conclusion
我们提出了YOLO,一个统一的目标检测模型。可以直接在全图构建和训练。不想基于分类器的方法,YOLO的损失函数于检测性能相关,可以让整个模型统一训练。
Fast YOLO是最快的通用目标检测,YOLO是目标检测最好的,YOLO也可以泛化到新的领域。